Big Rob是为越野活动设计的最新机器人小车。机器人小车将配备一些最新技术。例如,使用GPS架构进行精确导航。您可以在此处 找到有关GPS设置的更多信息 。大脚轮胎使Big Rob能够行驶在崎岖的地形。直流电机的转速为35 RPM x 12V。额定电流为1.8 A,输出扭矩为15 kg / cm。 这样就动力足够强大,足以给机器人小车上添加的你想要的所有设备。外壳足够大,可以存储一个12 V的大电池。我还将添加一个用于计算机视觉和自动驾驶功能的NVIDIA Jetson TK1开发套件。
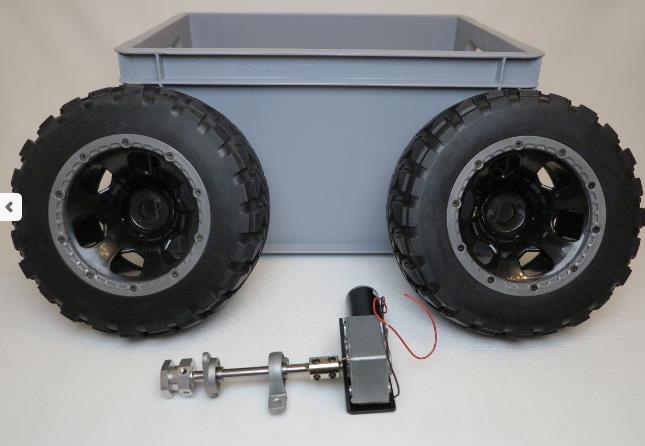
下图显示了两个齿轮直流电机和安装轮胎和轴而创造的传动系统。大脚轮胎使用24mm螺钉安装在车轴上。

下图显示了两个轮胎和一个装有钢轴的直流电机。注意塑料盒中钻孔的位置,以安装直流电机,轴,轴承和轮胎。塑料盒很容易加工。
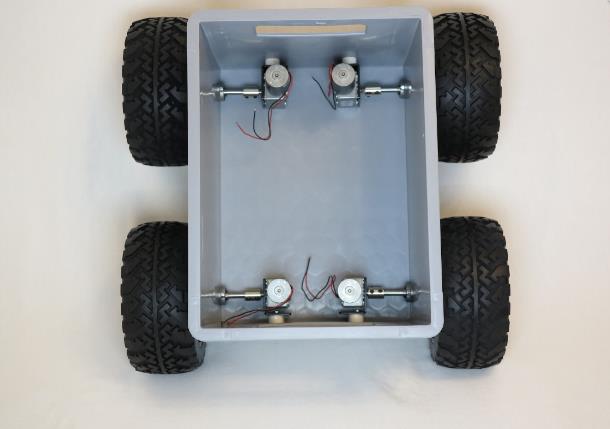
Big Rob的设计是一个模块化底盘,可以在第一个底盒顶部(该底盘是机器人小车的底盘)上轻松再添加一个塑料盒,轻松扩展该底盘。下图显示了机器车机箱。四个轮胎和四个直流电机。这些轮胎是直径为20厘米的1/5大脚轮胎。它足够大,可以轻松地在花园中四处行驶,而对于直流电机而言,则不算太大。
在机箱顶部,我可以轻松安装GPS和WIFI天线。摄像头可以安装在把手后的盒子中间。也可以为相机使用平移和倾斜套件。

总结:
建造机器人小车非常容易。塑料盒很容易用普通钻机加工。我钻了孔,以安装四个直流电机,滚珠轴承以及车轴。直流电机非常坚固,机器人可以轻松地四处行驶。